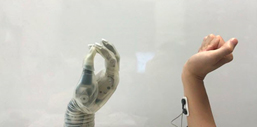
Биоинженеры смогли разработать новую технологию расшифровки нервно-мышечных сигналов для управления движениями протезов руки. Новая технология основана на компьютерной модели, которая точно имитирует движения составных структур предплечья, запястья и кисти. Эта технология может быть использована не только для управления протезами конечностей, но и в качестве компьютерных интерфейсных устройств для игровых и компьютерных разработок (CAD).
Тестирование технологии показало хорошие результаты, но еще не проходила клинические испытания. Технология была разработана специалистами биомедицинской инженерии в Университете штата Северная Каролина и Университете Северной Каролины в Чапел-Хилле.
Современное протезирование основано на машинном обучении протезов для «распознавания паттернов », что позволяет пациенту контролировать работу протеза. Такой подход требует, чтобы пользователи «научили» устройство распознавать определенные паттерны активности мышц и переводить их в команды - например, для сгибания или разгибания кисти протезной руки.
Вместо этого исследователи разработали пользовательскую модель скелетно-мышечной системы. Исследователи разместили электромиографические датчики на предплечьях шести добровольцев, и отслеживали, какие нервно-мышечные сигналы были ответственны за выполнение различных действий запястья и кисти. Эти данные затем использовались для создания общей модели, которая переводила эти нервно-мышечные сигналы в команды, которые управляют движением протеза.
«Когда кто-то теряет руку, мозг не отключается от этой части тела, как будто рука все еще существует», - говорит автор исследования Хуан. «Итак, если кто-то хочет захватить кистью руки стакан воды, мозг все равно посылает эти сигналы на предплечье. Мы используем датчики для сбора этих сигналов, а затем передаем эти данные на компьютер, где он подается в виртуальную модель скелетно-мышечной системы. Модель заменяет мышцы, суставы и кости, вычисляя движения, которые должны были бы произойти, если бы кисть и запястье были бы еще целыми. Затем они передают эти данные протезу руки, которые выполняют соответствующие движения, скоординировано и в реальном времени - более плавно, как естественное движение.
«Объединив наши знания о биологических процессах, связанных с механизмом движения, мы смогли создать новый нейронный интерфейс для протезирования, который является общим для многих пользователей, включая пациентов с ампутацией, и позволяет выполнять различные движения », - говорит Хуан.
И исследователи считают, что потенциал этой технологии не ограничивается только протезами конечностей.
При предварительном тестировании, как здоровые, так и пациенты с ампутацией смогли использовать интерфейс, управляя моделью, для выполнения всех необходимых действий руки, несмотря на то, что они очень мало тренировались.
Исследователи также изучают идею включения машинного обучения в общую скелетно-мышечную модель.
{kind=link}
{kind=link}
{kind=link}